
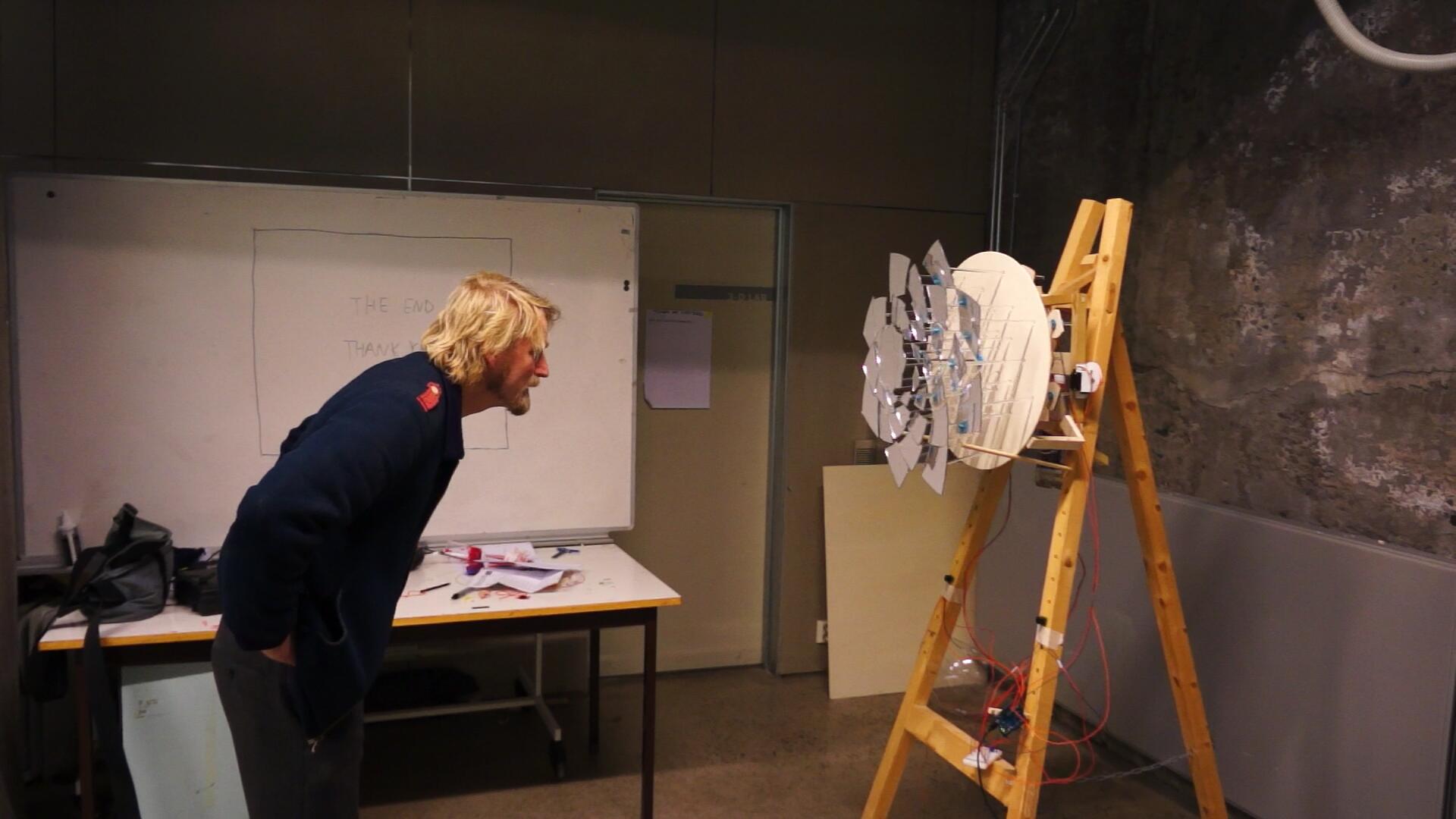
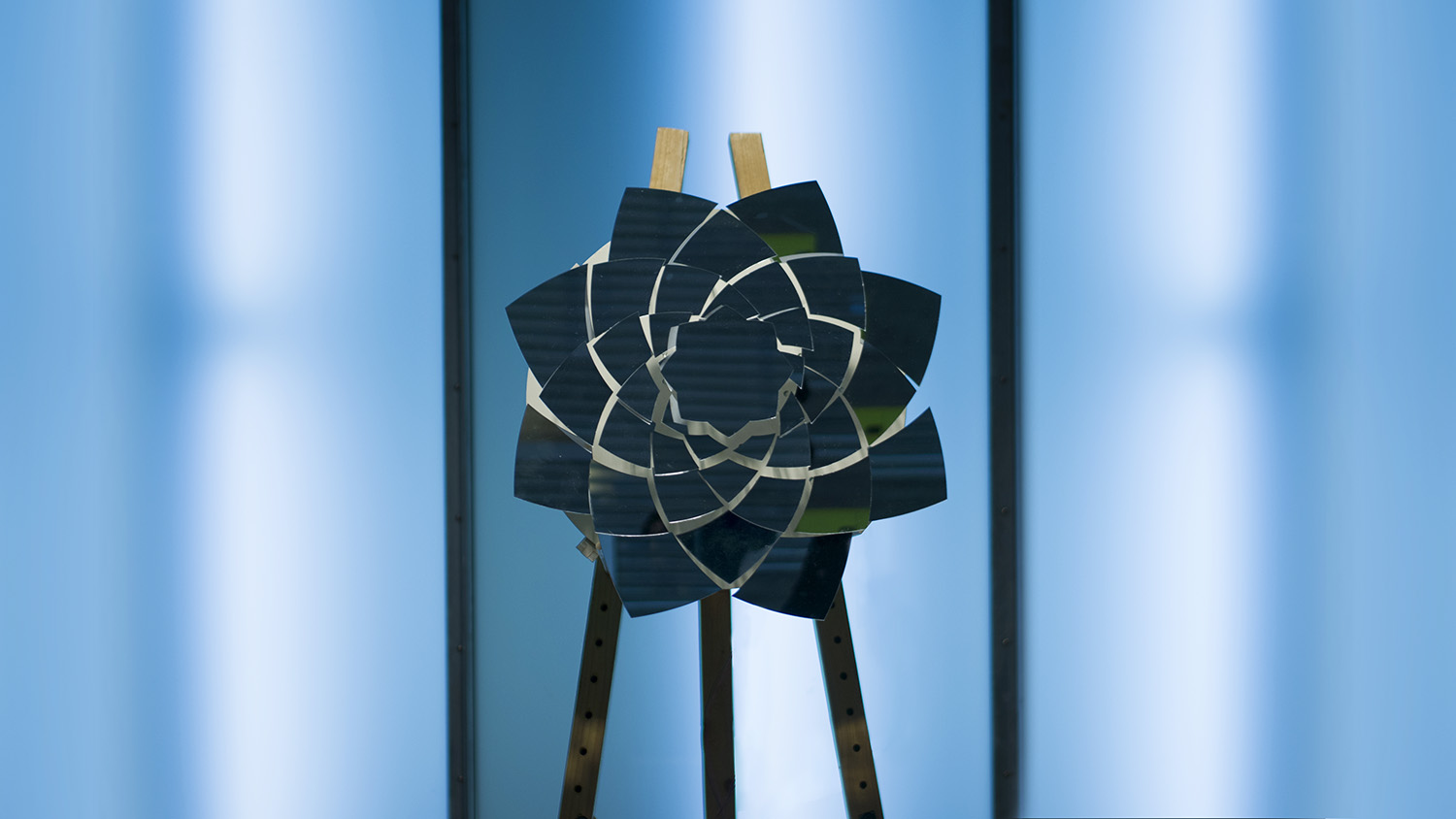
We chose 180 degrees servos and sonar sensors, built this big artificial "creature" which always curiously watch you with its 41 pieces mirror eyes.


Exploration of the servo
Advantage of this servo is its accuracy and high torque. So I convert its rotation to linear motion, to constitute a rectangular coordinate system, which can perform action nimbly and accurately. Because it 's quite small and can only rotate 180 degrees (90 in each direction), how to magnify it to interact with people is a new problem.

Giving it eyes and "intelligence"
I chose two sonar sensors as its eyes to capture person's distance, arduino will compare data and figure out the rough position of this person, then drive servos to pull all mirrors approximately facing to them.


Shaping the personality
Its behaviour defines its personality. I want to create a curiosity character always try to "watch" you when you close. It's friendly but react a little bit slow.

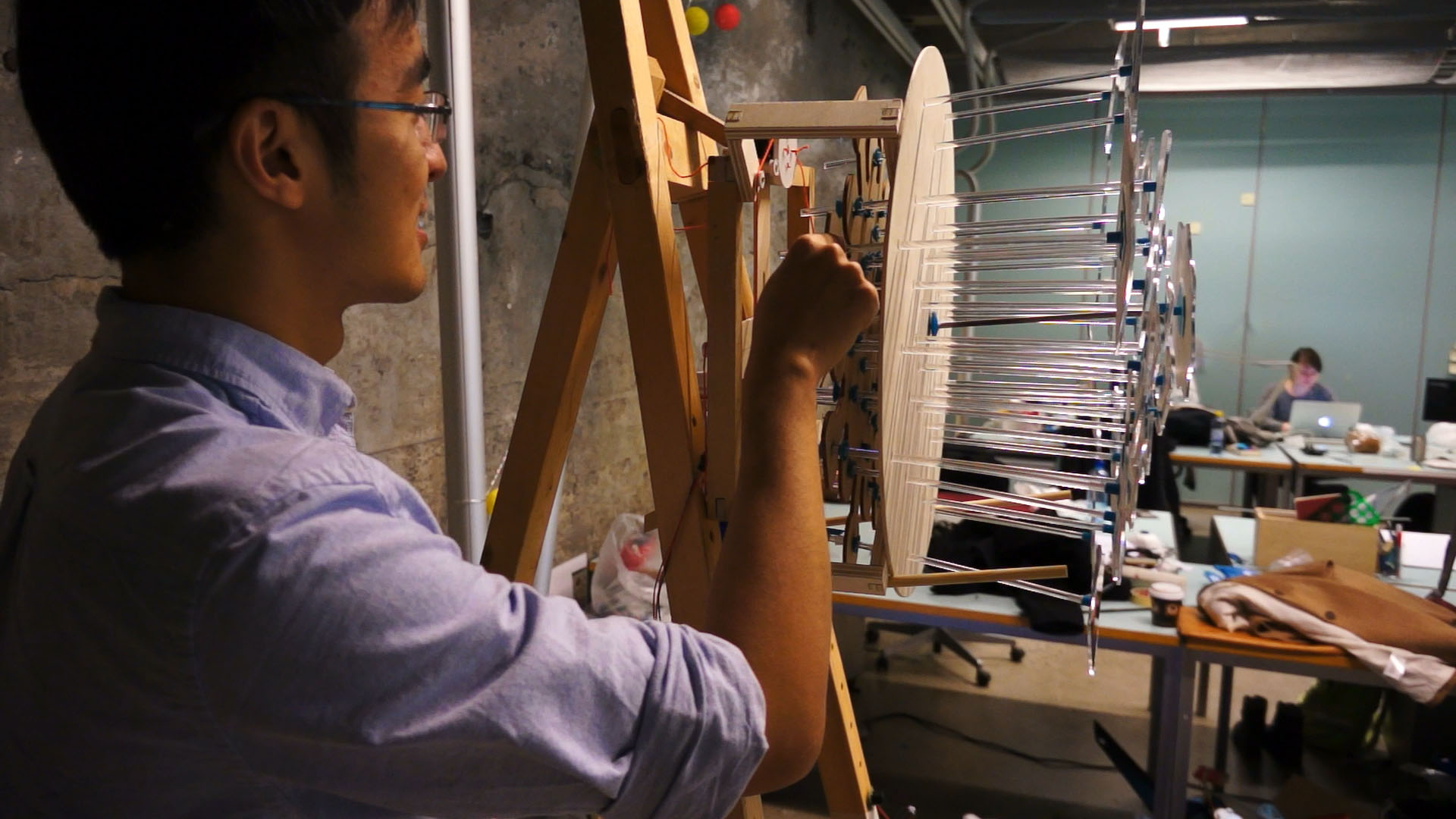
Building Structure
How to use 3 servos to generate rich and subtlety motions? I chose to use the basic lever principle, built a mirror array. Each piece shows different motion but all of them present a clear pattern of motion.



I use a servo to twist them in the same time, which gives them more complex motion.


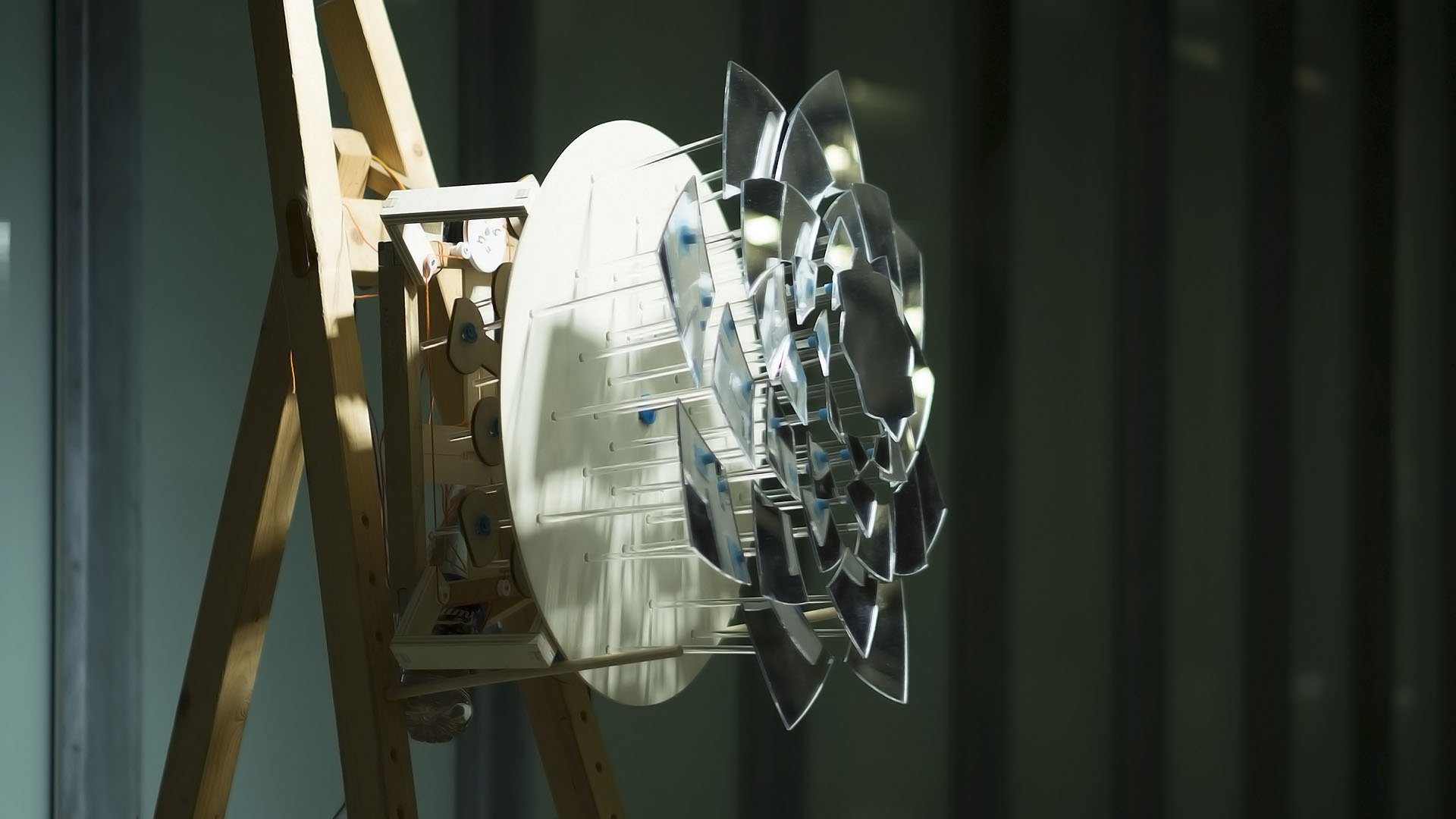
Light is a magical element. It brings surprising fruits were never thought before planing.


At the end, I upgraded it from jib arms to pulley-blocks, which can provide more stable motion.
Learning from 3D printing
As parametric was involved into this design, it is impossible to make each joint accurately by hand. 3d printing become the only choice. From lots failures in practices, I got knowledge of how to modeling for 3d printing, material properties, tricky problems of Ultramaker and Makerbot, and etc.

Duration: 4-weeks
Collaborators: Yafei
My roles: Interaction designer, Prototyper, filmmaker